Obter o deslocamento de um objeto pode ser uma tarefa complicada por conta dos sensores disponíveis para tal necessidade. No caso de usar um acelerômetro, um dos problemas é a dificuldade de entender como fazer a conversão da aceleração em posição. Entretanto, neste post, vamos aprender uma forma de fazê-la para implementar em um projeto por meio do acelerômetro MPU 6050.
(08/2020) O algoritmo foi atualizado e está bastante estável e com uma exatidão razoável. Com movimentos rápidos, fui capaz de obter medições que diferem alguns milímetros do valor real. Mas, para movimentos lentos e distâncias longas, o processo pode ficar pouco exato (varia alguns centímetros do valor real).
Obs: não deixe de ver o post sobre como usar o MPU 6050.
Metodologia
Se quiser pular a parte conceitual introdutória, vá para o tópico “Método dos trapézios”.
Conceito de aceleração
Antes de entender como obter o deslocamento, é importante entender o que é a aceleração. Ela nada mais é do que a variação da velocidade de um objeto em um intervalo de tempo. Seguindo o mesmo raciocínio, a velocidade é a variação da posição em um intervalo de tempo. Considere, por exemplo, um objeto se movendo com uma aceleração constante de 5m/s². Em um intervalo de 1 segundo, sua velocidade aumentará em 5m/s.
Derivada e integral
Certo, mas como converter aceleração para posição? Para entender por completo, vamos pensar o contrário, isto é, converter deslocamento para aceleração.
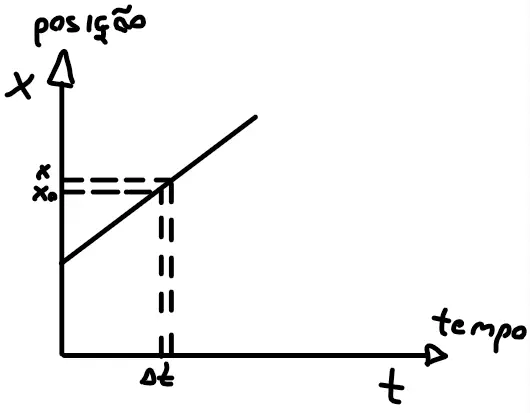
De acordo com o cálculo, a derivada de uma função em um ponto é a variação instantânea da função naquele ponto. Portanto, a derivada de uma função deslocamento de um objeto nos informará a velocidade instantânea no ponto. Porque a variação instantânea (Δt) da posição em um ponto (x) é justamente a velocidade:
\displaystyle v_{pontual} = \frac{x-x_o}{\Delta t}
De maneira análoga, se tivermos uma função velocidade em função do tempo, a derivada dela nos daria a aceleração. Tendo isto em mente, podemos utilizar a inversa da derivada para fazer o caminho contrário (converter aceleração para velocidade). E a inversa da derivada é justamente a integral. Sendo assim, calcular a integral de uma função aceleração nos dá a função velocidade. E calcular a integral da função velocidade, nos dá a função posição.
Até ai tudo bem, mas, a partir deste ponto, entra um problema: o acelerômetro informa apenas os valores instantâneos da aceleração e não uma função aceleração por tempo. Desta forma, podemos seguir dois caminhos:
- Obter uma equação aproximada da função aceleração com interpolação: de Lagrange, polinomial de Newton ou Interpolação de Gregory-Newton.
- Calcular a integral considerando sua definição base: que ela é a área sobre a curva de uma função.
O primeiro método é relativamente complicado de implementar (considerando casos com milhares de amostras). Já o segundo, retorna valores satisfatórios, é mais direto e mais fácil de implementar. A forma como farei para aplicá-lo é utilizando a regra dos trapézios.
Regra dos trapézios
Imagine uma função qualquer e, no meio dela, dois pontos consecutivos. A área debaixo da curva, no intervalo entre esses dois pontos, pode ser calculada com uma aproximação: considerar que a função varia linearmente entre os dois pontos. Dessa forma, esses dois pontos formarão um pequeno triângulo e um quadrado com a base do gráfico. Ou então, um único trapézio. Veja a imagem abaixo para entender melhor:
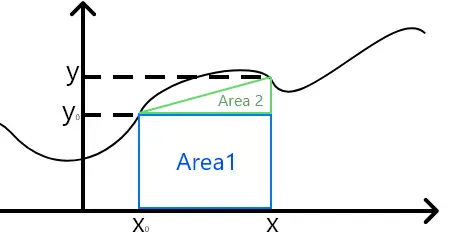
Considerar que esta área é um trapézio facilita muito as contas, pois calculamos apenas uma área diretamente e não duas. E a área do trapézio é dada como a soma das bases vezes a altura dividido por 2:
\displaystyle \frac{(B+b)*h}{2}
Reescrevendo a equação para os pontos do gráfico, teremos:
Observe que a altura será no eixo x e as bases serão no eixo y.
\displaystyle \frac{(y+y_o)*(x-x_o)}{2}
Para entender melhor, veja a imagem abaixo:
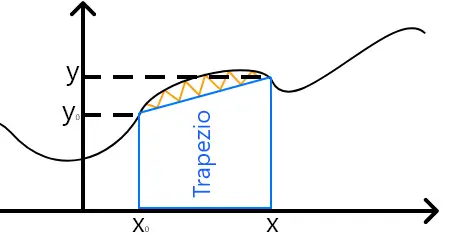
Note a área acima do trapézio, que está indicada em laranja. Quando fazemos esta aproximação de trapézios, estamos desconsiderando totalmente esta área em laranja. Portanto, os resultados não serão 100% exatos. De acordo com os resultados que obtive, percebi que esta aproximação foi pouco perceptível.
Significado da área da curva
Quando utilizamos o método dos trapézios para calcular a área, precisamos saber o que esta área está realmente representando. Imagine a função mostrada no tópico anterior como sendo uma função de aceleração pelo tempo. A área debaixo da curva entre dois pontos informa o quanto a velocidade variou naquele intervalo.
Ou seja, se no ponto x0 a velocidade é 1,0m/s e no ponto x é 3m/s, a área debaixo da curva dará um resultado de 2,0m/s (3-1). Com isso em mente, quando formos calcular a velocidade a partir da área, teremos que ir somando a velocidade encontrada “atualmente” com a velocidade no instante anterior para obtermos o valor da função velocidade e não o quanto a velocidade variou.
Por fim, com a ideia definida, podemos testá-la em uma função qualquer.
Exemplo
Pule para a implementação se não quiser ver a comprovação do método.
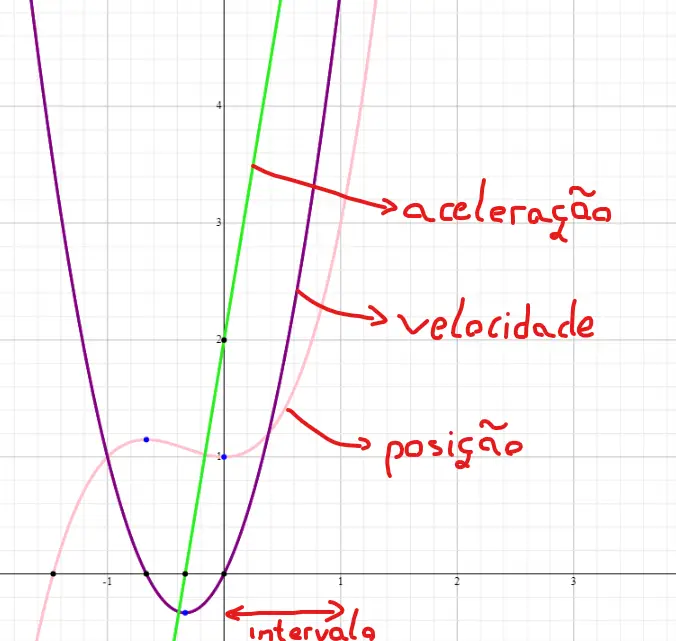
Para deixar as últimas explicações mais claras, vamos observar um exemplo prático. Considere a função posição x(t) como sendo:
x(t) = t^3 + t^2 + 1
Aplicando a derivada, conseguimos encontrar a função velocidade v(t). E aplicando a derivada uma segunda vez, obtemos a função aceleração a(t):
v(t) = 3*t^2 + 2*t
a(t) = 6*t + 2
Para simplificar, estou considerando o tempo em segundos e a medida de distância em metros. Agora, vamos supor que queremos encontrar o deslocamento a partir da aceleração, que ocorreu do instante t=0 até t=1s. Para isso, vamos considerar que estamos indo de 0,25 em 0,25 segundos. Portanto, teremos que dividir esse intervalo em 4 pedaços. Com a ajuda do Symbolab, plotei as três funções:
t=0 até t=0,25s
Antes de calcular a velocidade a partir da área da aceleração, vamos calcular o valor real da velocidade e da aceleração no instante t=0,25s para comparação futura.
x(0,25) = 1,078125m
v(0,25) = 0,6875m/s
Agora, para calcular a área debaixo da curva da aceleração, precisamos da aceleração em t=0 e t=0,25s:
a(0) = 2m/s²
a(0,25) = 3,5m/s²
Por fim, basta aplicar a regra dos trapézios:
\displaystyle Area = \frac{(2+3,5)*0,25}{2} = 0,6875
Observe o seguinte: a área encontrada (velocidade) é igual a velocidade no ponto t=0,25s. Como foi dito anteriormente, a área indica a variação da velocidade no intervalo especificado e, como a velocidade no instante t=0 é 0m/s, a velocidade encontrada pela área já é a velocidade do valor da função. E ela, neste caso, é exatamente igual, porque a função aceleração é uma reta, e a área debaixo de uma reta é exatamente um trapézio (ou um triângulo). Enfim, por motivos teóricos, podemos reforçar o primeiro aspecto fazendo:
v(0,25) = Area + v(0) = 0,6875 + 0 = 0,6875m/s
Com a velocidade encontrada, resta apenas encontrar a posição utilizando a regra dos trapézios com a velocidade da fórmula acima v(0,25) e v(0):
\displaystyle Area2 = \frac{(0+0,6875)*0,25}{2} = 0,089375
Observando o valor de x(0,25), podemos notar uma grande diferença. Mas vale lembrar, novamente, que o valor encontrado acima é a variação da posição no intervalo t=0 até t=0,25s. Portanto, como x(0) = 1, a posição real deslocada é 1,078125 – 1 = 0,078125. Comparando com o valor encontrado, vemos que existe uma imprecisão. Não haverá necessidade de somar o valor da área 2 com x(0), porque o real objetivo deste projeto é saber o deslocamento a partir de um dado instante 0.
t=0,25s até t=0,5s
Calculando os valores reais para comparação futura:
x(0,5) = 1,375m
v(0,5) = 1,75m/s
Calculando a aceleração em t=0,5s:
a(0,5) = 5m/s²
Aplicando a regra dos trapézios para encontrar a variação da velocidade com a(0,25) e a(0,5):
\displaystyle Area = \frac{(3,5+5)*0,25}{2} = 1,0625
Descobrindo v(0,5):
v(0,5) = v(0,25) + Area = 0,6875 + 1,0625 = 1,75m/s
Aplicando a regra dos trapézios para encontrar a variação da posição com Vaproximado(0,25) e o v(0,5) acima:
\displaystyle Area2 = \frac{(0,6875+1,75)*0,25}{2} = 0,3046875
Somando o deslocamento anterior com o atual, teremos um valor próximo do valor real deslocado:
Xaproximado(0,5) = 0,3046875 + 0,089375 = 0,3940625m
Comparando com x(0,5), dá um erro de 0,019m.
t=0,5s até t=0,75s
Calculando os valores reais para comparação futura:
x(0,75) = 1,984375m
v(0,75) = 3,1875m/s
Calculando a aceleração em t=0,75s:
a(0,75) = 6,5m/s²
Aplicando a regra dos trapézios para encontrar a variação da velocidade:
\displaystyle Area = \frac{(5+6,5)*0,25}{2} = 1,4375
Descobrindo v(0,75):
v(0,75) = v(0,5) + Area = 1,75 + 1,4375 = 3,1875m/s
Aplicando a regra dos trapézios para encontrar a variação da posição:
\displaystyle Area2 = \frac{(1,75+3,1875)*0,25}{2} = 0,61178
Somando os deslocamentos anteriores com o atual, teremos um valor próximo do valor real deslocado:
Xaproximado(0,75) = 0,089375 + 0,3046875 + 0,61178 = 1,0058425m
Comparando com x(0,75), dá um erro de 0,021m.
t=0,75s até t=1s
Calculando os valores reais para comparação futura:
x(1) = 3m
v(1) = 5m/s
Calculando a aceleração em t=1s:
a(1) = 8m/s²
Aplicando a regra dos trapézios para encontrar a variação da velocidade:
\displaystyle Area = \frac{(6,5+8)*0,25}{2} = 1,8125
Descobrindo v(1):
v(0,75) = v(0,75) + Area = 3,1875 + 1,8125 = 5m/s
Aplicando a regra dos trapézios para encontrar a variação da posição:
\displaystyle Area2 = \frac{(3,1875+5)*0,25}{2} = 1,0234375
Somando os deslocamentos anteriores com o atual, teremos um valor próximo do valor real deslocado:
Xaproximado(1) = 0,089375 + 0,3046875 + 0,61178 + 1,0234375 = 2,02928m
Comparando com x(1), dá um erro de 0,029m.
Considerações
Foi possível observar que o método funcionou de fato, ignorando a imprecisão. E a cada intervalo analisado, o erro aumentava um pouco. Então, se o tempo total da análise for grande (neste caso foi 1s), a tendência é obtermos um erro maior.
Quanto menor for o intervalo do cálculo (neste caso foi 0,25s), maior será sua precisão. Pois, fazendo isto estaríamos seguindo a real lógica por trás da integral que é dividir a área em infinitos quadrados de tamanho ínfimo. Na implementação, o intervalo será próximo de 0,001s, o que ajuda a melhorar a precisão dos cálculos.
Implementação no Arduino
Lógica escolhida
Seguindo o método explicado anteriormente, é possível implementá-lo no Arduino de diversas formas diferentes. A forma que escolhi foi fazer o cálculo apenas durante o movimento do acelerômetro. Ou seja, se o objeto está parado, nada acontece, mas assim que ele se move, o cálculo começa e só para quando o objeto fica imóvel novamente.
E, a regra dos trapézios é aplicada em “tempo real”. Isto é, vou calculando a velocidade e a distância durante o movimento considerando sempre a aceleração/velocidade anterior e a atual para cada nova medição. Isto ficara mais claro adiante.
Minha intenção não é cobrir a parte da comunicação com o MPU 6050, pois já fiz um post para isso. E farei uso apenas da aceleração em y para simplificar o código e facilitar o entendimento da implementação do método. Mas você pode alterar o eixo da aceleração facilmente.
Variáveis importantes
Ao longo da criação do código, precisei de criar algumas definições e variáveis globais importantes para o funcionamento do código. Adiante explico o significado de algumas delas. Não coloquei todas, pois algumas são mais tranquilas de interpretar.
- t_amostra
Variável que usarei para medir o tempo entre uma medição e outra. Esse tempo é importante, pois ele será o equivalente a altura do trapézio na hora de usar a regra dos trapézios.
unsigned long t_amostra;
O tempo será medido em microssegundos.
- t_parado
Esta variável serve para medir por quanto tempo o objeto apresentou uma baixa aceleração para poder declarar que ele está parado.
- #define STOP_OFFSET 300
O valor desta definição é o limite de aceleração considerado para verificar se o objeto está imóvel. Ou seja, qualquer valor de aceleração abaixo de 300, será considerado como se o objeto não estivesse se movendo. E este é um valor relacionado a medição bruta do sensor (de -32768 a +32767).
Talvez você precise alterá-lo se o seu sensor estiver detectando movimento mesmo estando parado.
- dist
Como a regra dos trapézios é calculada em “tempo real”, é necessário ter esta variável para ir armazenando a distância deslocada até o momento que o objeto ficar imóvel novamente.
Funções do acelerômetro
Para deixar o código mais fácil de interpretar, resolvi criar algumas funções para comunicar com o MPU6050. E não é preciso entendê-las para compreender a lógica principal do código.
Como são poucas funções, achei melhor criá-las do que utilizar uma biblioteca, já que, com isso, você pode simplesmente copiar o código completo e rodá-lo diretamente sem precisar baixar nada.
Um ponto importante a ser mencionado é a função que está sendo executada no void setup:
mpu6050_offset(-2267, -1111, 504);
Esta função serve para definir os valores dos offsets de calibração da aceleração. Ela recebe 3 parâmetros, cada um correspondente a um dos eixos do sensor. A forma como obtive estes parâmetros foi utilizando esta biblioteca (bastou rodar o código de exemplo IMU_ZERO). De todo modo, não pretendo entrar em detalhes sobre isso aqui.
Se você não pretende procurar como fazer isto, pode comentar/apagar esta linha. Mas saiba que, um valor errado do offset pode fazer a aceleração apresentar um valor bem distante do real.
Conversão e processamento das medidas
Para aplicar corretamente o procedimento estudado, não posso simplesmente utilizar o valor bruto de aceleração do sensor. Preciso, primeiro, convertê-lo em uma unidade convencional (m/s² no caso).
Como disse no post sobre o acelerômetro, o valor retornado pelo MPU6050 varia entre -32768 e 32767, cada um representando -2g e 2g respectivamente. Sendo assim, tenho que remapear os valores medidos para se encaixarem entre -2 e +2.
Utilizar a função map para este propósito não funciona corretamente, pois ela trabalha apenas com valores inteiros. Como estamos convertendo grandes números para um intervalo tão pequeno, fica claro que teremos que utilizar números decimais. Portanto, peguei a fórmula que fica dentro da função map e utilizei ela diretamente:
aux_ac = ((aux_ac + 32768.0) * 4.0/65536.0 – 2.0) * 9.81;
Como 1g equivale a 9,81m/s², bastou multiplicar o valor da conversão (-2g a 2g) por 9.81 no fim.
Obs: os valores das medições das acelerações são números inteiros. E levando em conta o que foi falado acima, foi preciso criar uma variável float para guardar valores decimais da conversão. No caso, isto é feito por meio da variável aux_ac. Por padrão, ela é igualada à aceleração em y, mas isto pode ser alterado facilmente trocando para o eixo desejado:
float aux_ac = float(ac_y);
Fim do movimento
Assim que o código detecta que o objeto ficou imóvel, ele printa o valor deslocado e zera ele. Isto é feito nesta parte:
1 2 3 4 5 6 7 8 9 10 11 12 | if (parado) { if(dist != 0.0) { Serial.println("Distância deslocada (em y): "); // A função retorna o valor em metros, // então multiplica por 100 para converter para centímetros Serial.print(dist*100, 2); Serial.println(" cms em y."); } dist = 0.0; } |
Portanto, se você deseja fazer algo com a distância deslocada, é só criar o seu código neste trecho. Repare que o valor calculado é em metros e o código multiplica ele por 100 para apresentá-lo em centímetros.
Função ‘calculo_trapezio’
Como foi dito, esta função faz o cálculo do deslocamento usando a regra dos trapézios. E o valor antigo da aceleração e da velocidade é armazenado dentro da própria função utilizando o modificador static.
1 2 | static float last_acel = 0.0; static float last_vel = 0.0; |
O fato das variáveis terem o modificador static, faz com que seus valores sejam mantidos entre uma chamada da função e outra. Mas, como pode ser visto acima, na primeira vez que a função é executada, o valor delas é 0.
Além destas, a função cria mais duas variáveis importantes, uma para armazenar o valor da velocidade atual e outra do tempo em segundos entre as medições:
1 2 | float vel; float t = (float)tempo/1000000.0; |
A variável t pega o intervalo entre as medições (tempo em microssegundos) e converte para segundos. Eu poderia ter feito esta conversão na hora de calcular a velocidade/distância, mas assim facilita a visualização do cálculo feito adiante.
Enfim, a regra dos trapézios está sendo aplicada de fato nestas duas linhas:
1 2 | vel = last_vel + (last_acel + acel) * t / 2.0; dist = dist + (last_vel + vel) * t / 2.0; |
Não tem muito o que comentar aqui, pois o cálculo acima foi visto no início deste post. O importante de observar é que estamos somando a velocidade do ponto anterior à velocidade atual. Isto, porque a “velocidade atual” é na verdade a variação da velocidade, conforme foi comentado anteriormente. E o mesmo se aplica à distância.
O restante do código que não foi abordado pode ser compreendido pelos comentários ou pela análise dos comandos.
Circuito
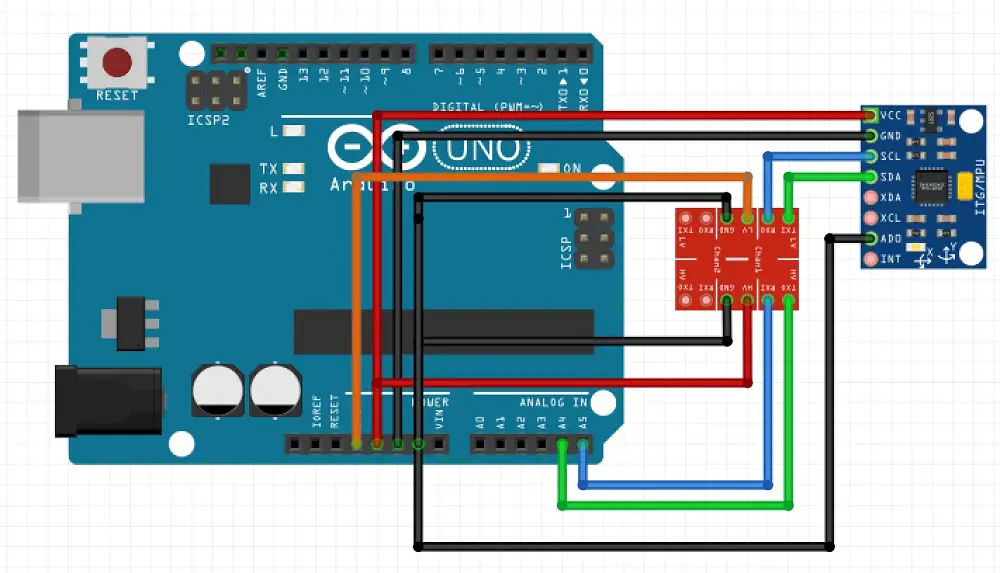
Um pequeno comentário a respeito da ligação dos pinos do acelerômetro pode ser encontrado no post sobre o assunto.
Código completo
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 | #include "Wire.h" // ----- Definições ----- // Endereço do MPU6050 para o pino AD0 em baixa #define MPU_ADDR 0x68 // Limite de aceleração para objeto parado #define STOP_OFFSET 300 // ----- Protótipo das funções ----- uint8_t mpu6050_init(); void mpu6050_offset(int16_t cal_ac_x, int16_t cal_ac_y, int16_t cal_ac_z); void mpu6050_write(uint8_t address, int16_t val, uint8_t size); int16_t mpu6050_read(uint8_t address, uint8_t size); // ----- Variáveis globais ----- // Variavel para armazenar o tempo entre cada amostra unsigned long t_amostra = 0; // Variaveis para verificar se o objeto está parado unsigned long t_parado = 0; bool parado = true; // Variavel para guardar a distancia deslocada float dist = 0; void setup() { Serial.begin(9600); // Inicializa a comunicação com o MPU6050 // definindo os offsets de calibração para a // aceleração em x, y e z respectivamente uint8_t resp = mpu6050_init(); if (!resp) { Serial.println("Falha na conexão do MPU6050"); } else { Serial.println("MPU6050 conectado"); } // Calibração // Comente esta linha se você não sabe os valores do seu sensor mpu6050_offset(-2267, -1111, 504); t_amostra = micros(); } void loop() { // Variaveis para armazenar o valor medido //int16_t ac_x = mpu6050_read(0x3B, 2); int16_t ac_y = mpu6050_read(0x3D, 2); //int16_t ac_z = mpu6050_read(0x3F, 2); // Cria uma variável auxiliar para manipular o valor de aceleração // Mude para o eixo desejado float aux_ac = float(ac_y); // ----- Detecção de objeto parado ----- // Aceleração baixa e mais de 50ms constante if(fabs(aux_ac) < STOP_OFFSET && abs(millis() - t_parado) > 50) { parado = true; t_amostra = micros(); } else if(fabs(aux_ac) >= STOP_OFFSET) { t_parado = millis(); parado = false; } // ----- Conversão do valor de aceleração ----- // Converte o valor medido para m/s^2 aux_ac = ((aux_ac + 32768.0) * 4.0/65536.0 - 2.0) * 9.81; // ----- Calculo da distancia deslocada ----- //Se está parado if (parado) { if(dist != 0.0) { Serial.println("Distância deslocada (em y): "); // A função retorna o valor em metros, // então multiplica por 100 para converter para centímetros Serial.print(dist*100, 2); Serial.println(" cms em y."); } dist = 0.0; } // Está se movendo else { // Calcula o tempo percorrido t_amostra = micros() - t_amostra; dist = calculo_trapezio(dist, aux_ac, t_amostra); t_amostra = micros(); } } /* * Calcula em tempo real a distância percorrida pela regra do trapézio * Parâmetros: * - dist - distância que está sendo calculada * - acel - aceleração medida atualmente * - tempo - tempo em microssegundos gasto desde a ultima medição */ float calculo_trapezio(float dist, float acel, unsigned long tempo) { // Armazena o ultimo valor de aceleração e velocidade dentro da própria // função declarando a variável como static (no 1º momento ela será 0) static float last_acel = 0.0; static float last_vel = 0.0; float vel; // Converte o tempo para um valor em segundos float t = (float)tempo/1000000.0; // Se o movimento acabou de começar, reinicia a velocidade e a aceleração if(dist == 0.0) { last_vel = 0.0; last_acel = 0.0; } // Calculo utilizando a regra do trapézio // Soma a velocidade anterior vel = last_vel + (last_acel + acel) * t / 2.0; dist = dist + (last_vel + vel) * t / 2.0; // Atualiza os valores antigos de aceleração e velocidade last_acel = acel; last_vel = vel; return dist; } // ----- Funções para comunicar com o MPU6050 ----- /* * Inicia a comunicação com o MPU6050 e retorna 1 se for bem sucedida */ uint8_t mpu6050_init() { Wire.begin(); //Inicia a comunicação I2C // Lê o endereço do mpu para verificar se ele está conectado // se não estiver, sai da função uint8_t id = mpu6050_read(0x75, 1); if(id != MPU_ADDR) { return 0; } // Define a fonte de clock do sensor para maior estabilidade // 0x6B = registrador PWR_MGMT_1 // 4 = Clock externo (32.768kHz) // 5 = Clock externo (19.2MHz) mpu6050_write(0x6B, 4, 1); return 1; } /* * Define os valores de offset do MPU6050 * Parâmetros: * - cal_ac_x: ofsset de calibração da aceleração em x * - cal_ac_y: ofsset de calibração da aceleração em y * - cal_ac_z: ofsset de calibração da aceleração em z */ void mpu6050_offset(int16_t cal_ac_x, int16_t cal_ac_y, int16_t cal_ac_z) { // Acel x mpu6050_write(0x06, cal_ac_x, 2); // Acel y mpu6050_write(0x08, cal_ac_y, 2); // Acel z mpu6050_write(0x0A, cal_ac_z, 2); } /* * Escreve em um registrador do MPU6050 * Parâmetros: * - address: endereço do registrador * - val: valor a ser escrito no registrador * - size: quantidade de bytes para escrever (o máximo são 2) */ void mpu6050_write(uint8_t address, int16_t val, uint8_t size) { Wire.beginTransmission(MPU_ADDR); Wire.write(address); if(size == 2) { Wire.write(val >> 8); // MSByte } Wire.write(val & 0xFF); // LSByte Wire.endTransmission(); } /* * Retorna o valor de um registrador (ou dois consecutivos) do MPU6050 * Parâmetros: * - address: endereço do registrador * - size: quantidade de bytes para ler (o máximo são 2) */ int16_t mpu6050_read(uint8_t address, uint8_t size) { int16_t data = 0; Wire.beginTransmission(MPU_ADDR); Wire.write(address); Wire.endTransmission(false); Wire.requestFrom(MPU_ADDR, size); if(size == 2) { data = Wire.read() << 8; } data |= Wire.read(); return data; } |
Considerações finais
O funcionamento do projeto pode ser comprovado pelo vídeo abaixo. Acabei utilizando o NodeMcu para não ter que usar nenhum conversor de nível lógico, mas o Arduino deve funcionar da mesma forma.
Como pôde ser visto, além da distância calculada ter sido bem próxima da real (talvez 1mm de diferença), o algoritmo é capaz de informar o sentido da variação. No caso do vídeo, para direita é negativo e para esquerda positivo.
Pelo que percebi, o código funciona bem para movimentos que começam e terminam rápido (menor que 1 segundo). E o cálculo de movimentos mais demorados fica mais impreciso, mas ainda bem razoável. Enfim, o vídeo abaixo apresenta alguns comentários envolvendo o projeto e suas características.
Não posso esquecer de mencionar o blog Engenheirando, que foi de onde tirei a ideia deste post há cerca de 1 ano atrás.
Acelerômetro MPU6050 com o Arduino
Eu estou com um projeto no qual eu precisão na casa dos milímetros, será que a implementação com o acelerômetro MPU6050 proveria essa precisão?
Pelos testes que fiz, creio que não, pois os valores lidos pelo MPU6050 não são nada estáveis para a faixa dos milímetros. Sem falar que este método que mostrei no post também não é muito preciso.
Para o seu caso, recomendo um sensor de distância ultrassônico (HC-SR04), que possui uma precisão de 3mm. Ou então, este sensor de distância a laser pode servir.
Entendi, obrigado Fabio.
Tudo bem. Por nada!
Estou em um projeto e queria saber se tem algum problema se eu usasse o seu código no meu mecanismo.
Não tem problema algum. Só peço para referenciar a origem do código no seu projeto.
Parabéns, muito bom, e a explicação sem comentários, certamente está ajudando a muitos com projetos semelhantes.
Muitíssimo obrigado, Gilmar! Fico feliz em saber que a explicação foi boa. E espero mesmo estar ajudando várias pessoas em seus projetos.
Boa noite. Como faço pra medir a velocidade nos três eixos (x, y e z)?
Boa noite, Jonatas! Para obter as velocidades é só usar os valores contidos no vetor “velocidades”. Neste caso, você teria velocidades momentâneas de cada intervalo medido. Para obter a velocidade média de um certo período (1s por exemplo), basta somar todas elas e dividir pela quantidade de medições.
Sobre os demais eixos: o cálculo todo foi feito para o eixo X, mas, para os outros, o procedimento é o mesmo.
Se tiver duvida em relação ao código, pode me enviar um e-mail (mundoprojetado@gmail.com), que te ajudo melhor.
Eu estou a fazer um projeto de monitorização desportiva. Ele serve para determinar o deslocamento de um jogador de futebol. Eu calculei a aceleração ,como você fez, nos 3 eixos(x,y,x) e depois calculei um vetor aceleração total. Mas os resultados do deslocamento final não foram os melhores quando vou testar no campo de futebol. Podia me dar umas dicas e que erro estou a fazer.
Irei referenciar a origem do código no meu relatório.
Olá, João. Que ideia ótima, gostei bastante!! Bem… a primeira recomendação que posso te dar é utilizar um acelerômetro mais preciso. Pois, se o seu for o MPU6050, é recomendável utilizar outro, pois ele é bastante impreciso para esta aplicação. E infelizmente não sei citar um outro acelerômetro, mas nada que uma pesquisa rápida não resolva (provavelmente os mais caros são mais precisos).
A segunda dica que posso te dar é quanto ao método de cálculo da integral. Para diminuir o erro do método dos trapézios, você pode amostrar dados em uma frequência mais elevada.
Enfim, estas são as melhorias que consegui pensar. Espero ter ajudado.
Pois o problema está em calcular o deslocamento no espaço. Em x foi fácil, mas quando junto tudo (x,y,z), o resultado não é bom e por vezes o código nem responde. O eixo do Z complica tudo.
Certamente que este sensor não foi a melhor escolha.
Lidar com este acelerômetro dá muita dor de cabeça mesmo. Mas não entendi se o problema está na imprecisão do sensor ou no cálculo quando envolve o eixo z. Se for o do eixo z, você pode tentar fazer um teste sem considerar ele, visto que, idealmente, um jogador de futebol se movimenta apenas em x e z. Sei que na prática isto não ocorre, mas vale a pena testar.
Já fiz isso, usando só em x e y. Mas o mínimo de inclinação baralha o sensor e dispara logo para valores absurdos de deslocamento.
Hmm. Faz sentido, e para manter ele sem inclinar só utilizando um estabilizador de câmera (o que é bastante inviável). Então… tente trocar o acelerômetro mesmo para ver se o resultado é melhorado.
Olá amigos.. estou apanhando aqui…
consegui compilar mas ficam duas duvidas vitais.
O retorno do MPU não para de oscilar, e não entendi bem porque acontece.
Outra coisa, quando movimentada o protoboard creio que deveria alterar de forma razoável (ficando sem saber o centimetro em x. ex 788.837646.
Olá, Edson. Então, o seu problema pode ter várias causas, mas vou citar as mais prováveis:
As próprias leituras de aceleração do MPU6050 são instáveis. Portanto, as medidas de distância também ficarão oscilando. E elas não apresentam uma precisão boa, pois, conforme citei em outros comentários, o MPU6050 apresenta uma imprecisão de leitura que é somada à imprecisão do método utilizado para descobrir a distância. Sendo assim, o valor final de distância em centímetros não é muito preciso e pode oscilar bastante.
Uma forma de resolver seu problema é utilizando um acelerômetro mais preciso. Ou então, dependendo da aplicação, utilizando de fato um sensor de distância (ultrassônico, infravermelho etc).
Olá Fábio, como eu saberei o número de amostras necessário para um percurso? Outra pergunta é, como eu consigo determinar quando meu carrinho faz uma curva mais fechada ou aberta?
Olá, Graziela. Excelentes perguntas!
Então, saber o número de amostras do percurso não é algo razoável de ser feito, pois é uma tarefa possível apenas quando você tem um percurso previamente conhecido e a condição de inicio e fim é bem controlada. Agora, no caso do post, a ideia foi mostrar uma abordagem genérica, em que o algoritmo fica calculando o deslocamento a cada 100 amostras (a cada 60 milissegundos). A partir disto, você pode criar uma variável dentro do seu programa que fica somando estas distâncias para saber a distância total deslocada (vários “pedaços” de 100 amostras).
Respondendo sua outra pergunta, é bem difícil te apontar quais são os parâmetros que permitem fazer esta distinção das curvas. O ideal seria você colocar o acelerômetro no carrinho e ficar medindo a aceleração nos 3 eixos para vários casos de curvas abertas e fechadas. Com isto, você observaria na prática qual o comportamento da aceleração em uma curva aberta e uma fechada. Entretanto, pensando por alto, eu diria que a aceleração (ou melhor, a desaceleração neste caso) do carrinho na curva fechada seria maior do que na curva aberta. Isto porque, na curva fechada, o carrinho é obrigado a diminuir a velocidade mais rapidamente que na curva aberta (em que ele pode ir diminuindo aos poucos). Obs: lembrando que a aceleração é a variação da velocidade pelo tempo (vfinal-vinicial/tfinal-tinicial).
Talvez as respostas não tenham te ajudado muito, mas, se quiser, me diga qual é o contexto do seu problema que posso te ajudar de uma melhor forma.
Boa noite, implementei esse código no meu projeto. O projeto consiste em coletar distâncias em metros dentro de ambientes, como casas, salas de aula. A distância gerada vária muito, exemplo: uma sala de 5 metros de largura, andei várias vezes pela sala e em todas as vezes o sensor me dava uma media diferente, a media passa dos 400 metros, chega até mais de 1000 metros no display, O que não é a distância real. Porque isso acontece? Vou apresentar o projeto na sexta-feira e não sei que explicação dá a esse problema, a aplicação funcionou só as medidas que não batem com o real.
Boa noite, Jéssica. Caramba, não fazia ideia de que o erro poderia ser tão grande assim pra distâncias na casa dos metros. A realidade é que o projeto, do jeito que está, realmente possui a limitação de não ser capaz de medir distâncias acima de 100 cm (valor arbitrário que defini) com precisão satisfatória (não fiz medições para dar um valor numérico à precisão, por isso estou sendo vago). Como a sua apresentação é sexta-feira, acredito que não vai dar tempo de fazer melhorias no código, então a coisa mais viável a se fazer é expor esta limitação do projeto e talvez fazer a medição em várias etapas. Por exemplo: fica em uma ponta da sala, dá um passo em direção à outra ponta da sala e anota a medida. Dá outro passo e anota a medida; Faz isso até chegar à outra ponta e no fim soma os valores. Fazer assim talvez vai te dar um resultado mais próximo do real (espero que ao menos com um erro na casa dos centímetros).
Agora, sobre sua pergunta “Por que isso acontece?”: tem vários motivos para isso e o resumo é que vários pontos do cálculo da distância possuem imprecisões. Por exemplo: o cálculo da integral pela regra dos trapézios envolve um certo erro por considerar área a mais ou a menos da curva real da aceleração/velocidade. E, cada vez que a integral é calculada, o erro vai sendo acumulado, ao ponto de que, para movimentos longos e ou grandes, o erro acumulado vai chegar ao valor que você mencionou. Obs: O cálculo da velocidade vai ter o erro acumulado da integral da aceleração e da integral da velocidade. Outra coisa que contribui com o problema é o MPU6050: ele apresenta ruído nas medições e não possui uma taxa de amostragem considerável para que possamos obter um “curva” de aceleração mais detalhada. Além disso tudo, a própria medição do tempo não é lá totalmente precisa e pode contribuir com o erro também.
Como proposta de melhoria, você pode falar da substituição do MPU6050 por outro menos ruidoso e com taxa de amostragem maior, bem como a implementação de um cálculo de integral mais preciso.
Fábio, obrigada pela explicação, vou mencioná-la enquanto apresento. No próximo curso que vou fazer irei continuar pesquisando para melhorar o projeto. Irei citá-lo na apresentação, muito obrigada.
Por nada! Que ótimo, boa sorte em seus próximos projetos então. Se você conseguir melhorar bem, pode até vender um dispositivo que faça esses cálculos. Até hoje só vi um, que ainda não começou a ser vendido (desenvolvido fora do Brasil). Então é uma ótima oportunidade de projeto.
Olá, gostei muito do trabalho.
estou tentanto utilizar o sensor para medir o deslocamento de um robô, porém o erro da integração da aceleração cresce muito. Poderia me dar uma ideia de como poderia corrigir esse erro, como você encontrou os valores para o Offset e uma sugestão de como corrigir esses valores para distâncias maiores?
mpu6050_write(0x06, cal_ac_x, 2);
// Acel y
mpu6050_write(0x08, cal_ac_y, 2);
// Acel z
mpu6050_write(0x0A, cal_ac_z, 2);
Não entendi essas linhas. Poderia me ajudar
Desde já agradeço pela atenção e trabalho
Olá, Matheus. Obrigado! Vamos por partes:
Para encontrar o offset você pode usar a biblioteca que comentei no tópico “Funções do acelerômetro”. É só rodar o exemplo “IMU_ZERO” com o acelerômetro parado que ele vai te dizer quais são os valores de offset.
Sobre as linhas que você perguntou, elas servem para acessar os registradores 0x06, 0x08 e 0x0A do MPU6050, que são justamente os registradores responsáveis por armazenar o offset.
Para melhorar os resultados ainda, tem algumas coisas que você pode fazer, por exemplo:
1- usar um método melhor de integração, como a regra de 3/8 de Simpson (é tranquilo de entender);
2- remover a influência da gravidade da terra sobre as medições. Tem muitas formas de fazer isso e acredito que todas são complicadas. Mas a mais fácil talvez seja aplicar uma média móvel sobre as leituras (filtro passa-baixas).
De todo modo, saiba que o que você está tentando fazer é algo que outros trabalhos já tentaram e não conseguiram. Isso não quer dizer que não é possível, mas sim que é um desafio, o qual eu não tenho todas as soluções. Então o que falei acima é apenas um direcionamento do que eu acho que faz sentido.
Sugestão para medir distâncias independente da inclinação do acelerômetro. Calcule os deslocamentos em x, y e z pelo método do Fábio. E extraia a resultante entre os valores dos deslocamentos. Está resultante será o deslocamento total que também fornece o ângulo do deslocamento. Parabéns pelo projeto
Excelente sugestão, Rogerio. Valeu também pelo comentário!