Robô pêndulo invertido com controle PID Este projeto consiste na criação de um robô pêndulo invertido com controlador PID em ambiente de simulação Webots. Continue lendo
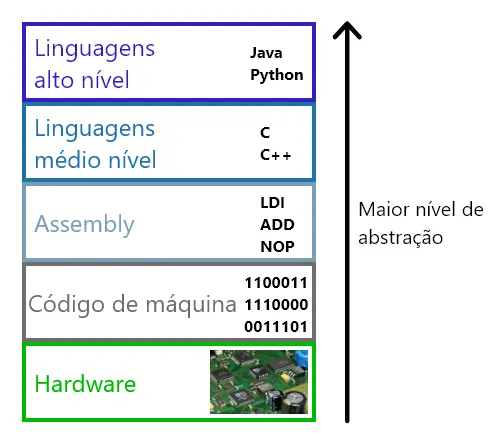
Firmware e IDE – Aula 4 – MC Nesta aula, aprenderemos o que é um firmware e quais são os softwares utilizados para programar um AVR e um PIC (IDEs). Continue lendo