O controle PID é uma ótima ferramenta para controle de processos industriais e também no controle de robôs. Sendo assim, vamos aprender a implementá-lo na prática e entender as diferenças entre os controladores P, I, D e suas combinações.
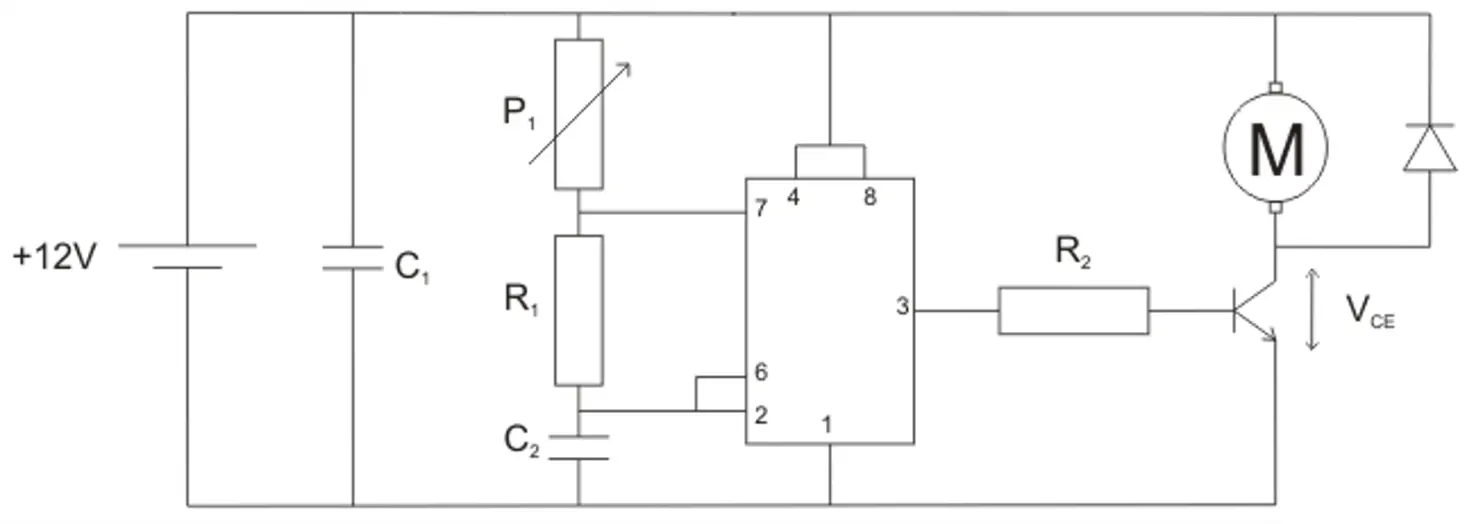
Precisa controlar o brilho de um LED ou até diminuir a velocidade de um motor CC? Então a ferramenta ideal é o PWM, que é tão falado, mas alguns podem não conhecer.
Todo mundo já deve ter usado, em algum momento da vida, um joystick, mas quase ninguém sabe como é um por dentro. Saiba que a eletrônica que há dentro deles, de modo geral, não é coisa de outro mundo, muito pelo contrário, é bem fácil de entender.