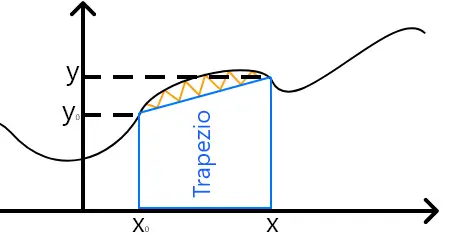
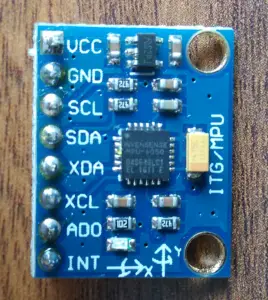
Obter o deslocamento de um objeto pode ser uma tarefa complicada por conta dos sensores disponíveis para tal necessidade. No caso de usar um acelerômetro, um dos problemas é a dificuldade de entender como fazer a conversão da aceleração em posição. Entretanto, neste post, vamos aprender uma forma de fazê-la para implementar em um projeto por meio do acelerômetro MPU 6050.
O acelerômetro está presente em diversos dispositivos nos dias de hoje. No celular ele responsável por informar a rotação, assim como em alguns joysticks. Portanto, vamos aprender a utilizar o acelerômetro MPU6050 para podermos fazer projetos interessantes.